
組み立て済みブロック
QueryBlockメソッドを実行すると、下のような画面が表示されます。

この画面で組み立てブロックを選択すると、カーネルブロック、モータブロック×2、光センサー、タッチセンサーを組み合わせた組み立て済みロボットと、そのロボットを動かすためのフィールドをシミュレートした画面が表示されます。
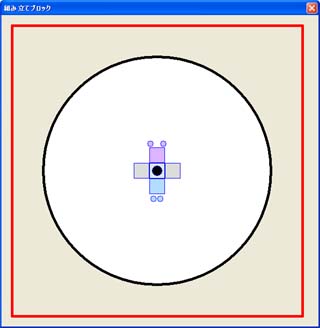
中央に表示されているのが、組み立て済みブロックで、中心のブロックがカーネルブロック、ピンクのブロックはタッチセンサーブロック、青いブロックは光センサーブロック、グレーのブロックは、モーターブロックを表しています。
黒い線は、光センサーで関知するための線です。
赤い線は、障害物(壁)を表しています。モータでフィールド内を移動させているときに、ロボットが赤い線に触れると、移動が停止します。
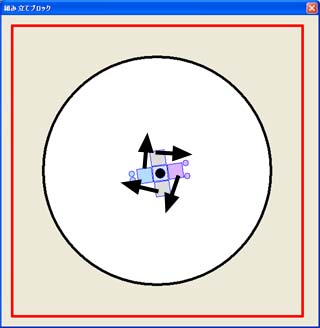
カーネルブロックの中心部分をドラッグすると、ロボットの位置を移動させることができます。
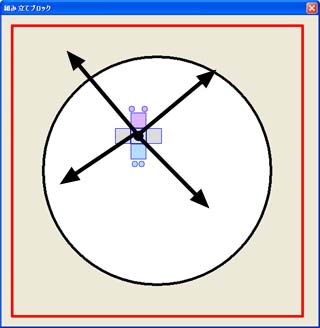
カーネルブロック以外のブロックをドラッグすると、ロボットを回転させることができます。
ウィンドウをダブルクリックすると、下のような、フィールドに表示される線や障害物を選択するためのダイアログボックスが表示されます。
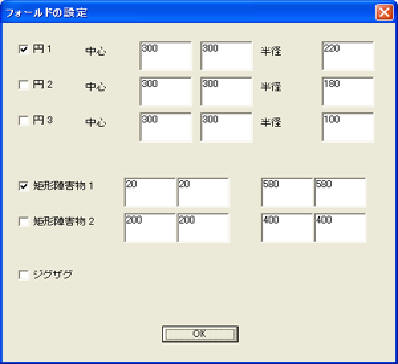
初期状態では、ライントレーサー用に、外壁と黒い線の円が1つ表示されるようになっています。