This art work will be exhibited at NT
Toyama in September and "MikanoharArt"
in November.
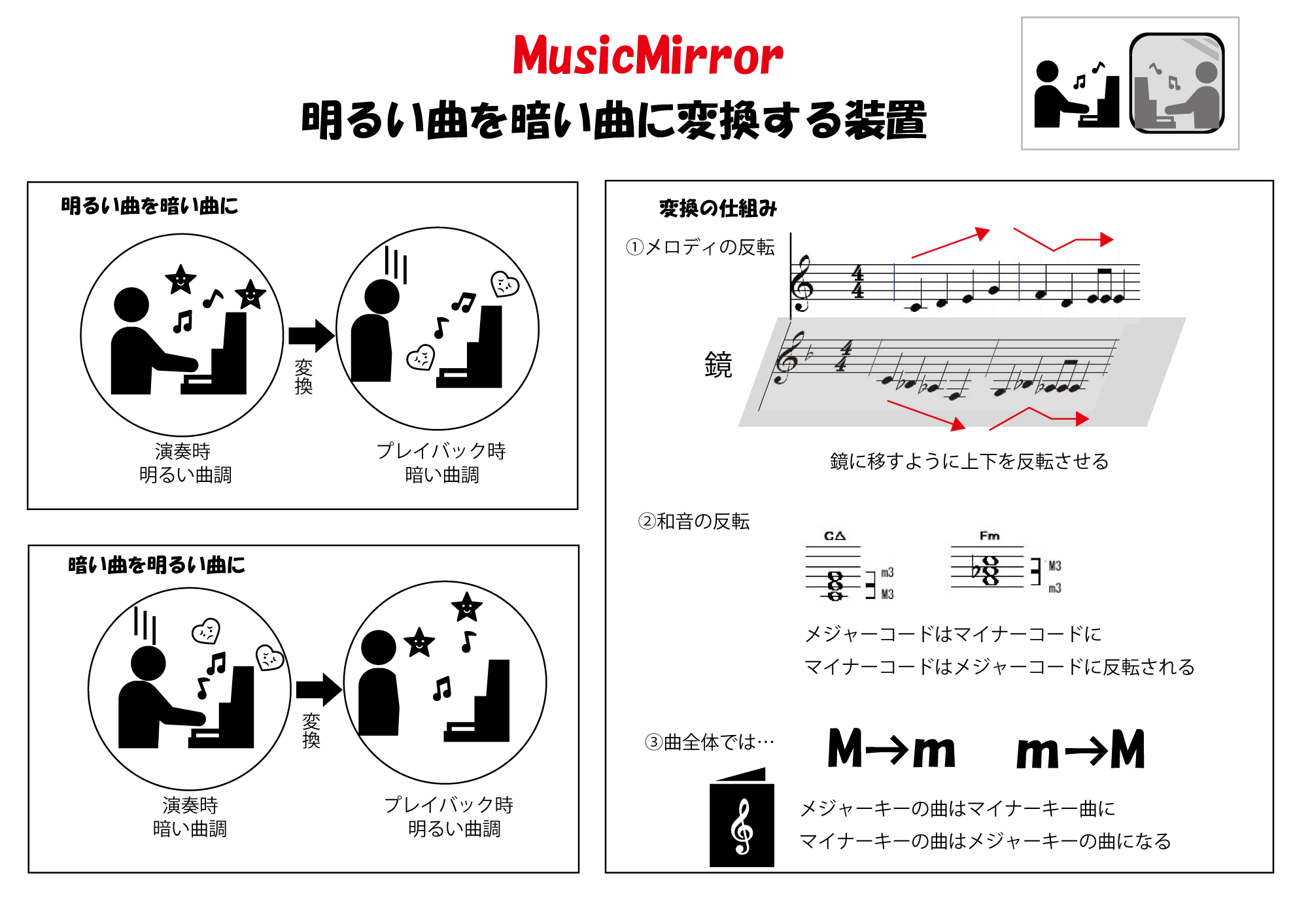
It's a media artwork called MusicPlant
(MusicMirror) that I made over 20
years ago, and it's been 10 years
since I last exhibited it.
It used a technology called DirectX,
which was abandoned by MicroSoft, and
it barely worked in the current
environment, but I took the plunge and
remade everything.
Songs with cheerful tunes are
converted to gloomy tunes, and songs
with gloomy tunes are converted to
cheerful tunes and played back.
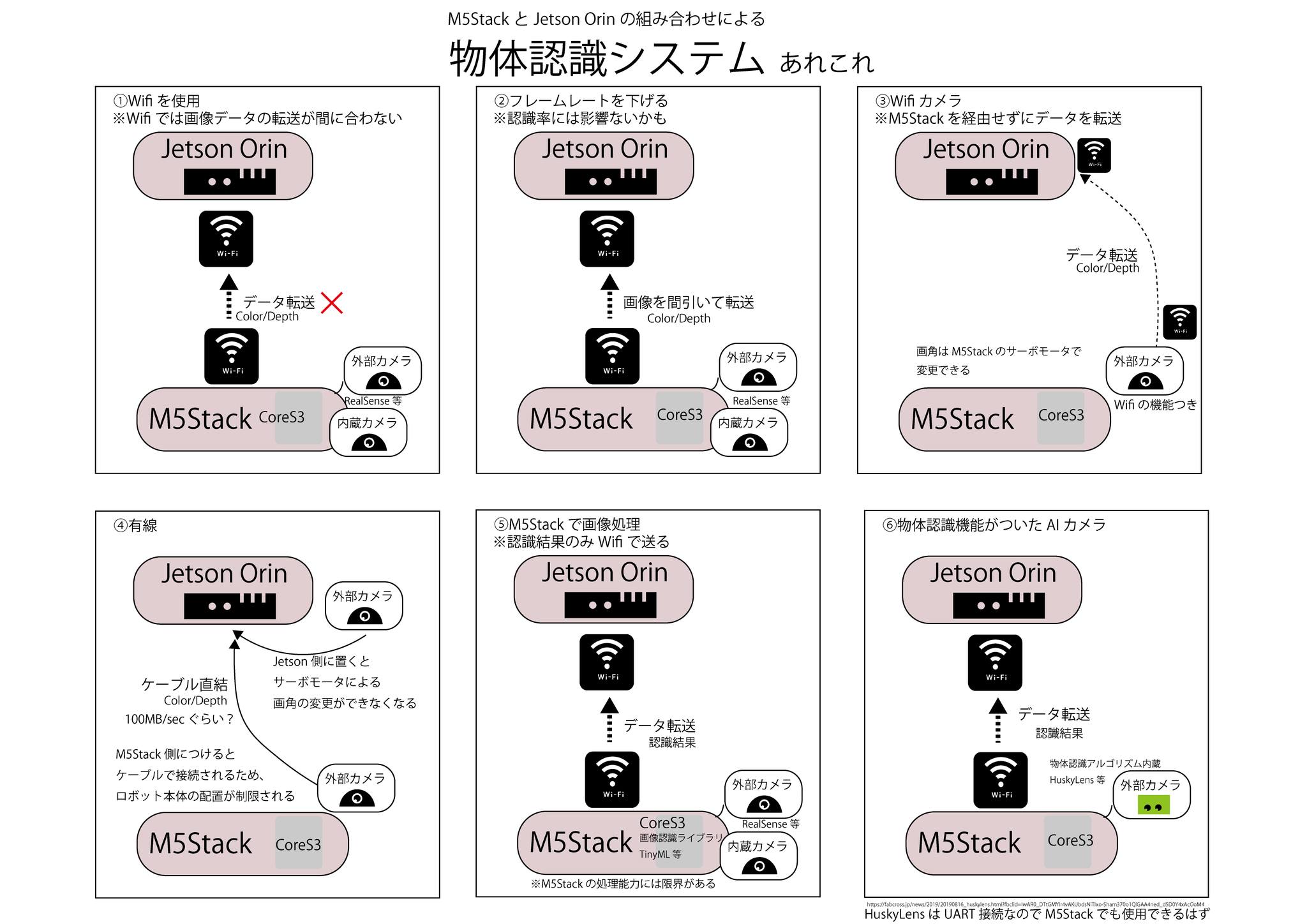
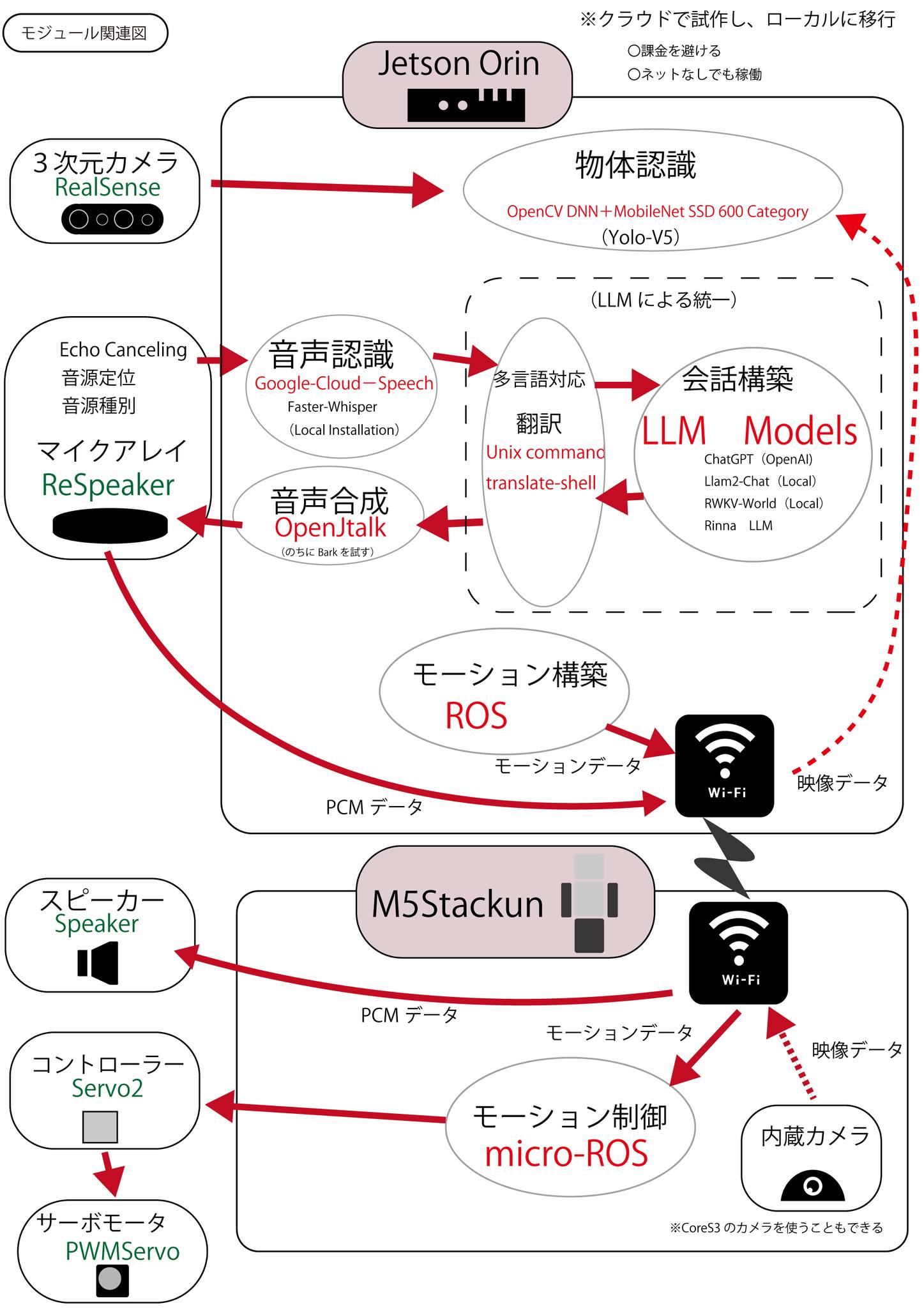
Regarding object recognition,
When the camera is placed on the robot
side (M5Stack) and the image data is
sent to the PC (Jetson Orin), the
amount of data is too large.
Wifi doesn't transfer in time.
Although there are some solutions. . .
Due to various circumstances, there
will be no event participation in
August.
8月15日
Future development Plan
Buddykun carried the DF robot's
Latepanda on its back.
At the development of M5Stackun, we
abandon the integration of the robot
and the PC, and placed NVIDEA's JETSON
Orin on the outside.
Instead of using large language models
in the cloud, it will include speech
recognition, text-to-speech,
conversation building, etc. all
inside.
Who knows this song?
This song is the theme song of an
anime program in 80s.
First Human Giatrus is a Japanese
anime television series about
primitive people..
Making a robot using M5Stack Week 6
AquesTalk (speech synthesis) and
Servo2 (16 channel driver) can not be
used at the same time due to i2c port
relationship.
I changed the setting and program of
AquesTalk to use UART.
Servo2 has an external power supply
for the servo motors, so I tried
connecting it with a USB cable with a
boost function, but it made a lot of
noise and I couldn't use it.
It took me a while to realize that
using a mobile battery instead of the
AC adapter eliminated the noise. I
haven't tried it, but a stabilized
power supply should be fine.
I tried make it walking a little, but
it's really difficult with one servo
for each leg. It seems to be moving
forward. . . I'm aiming to walk like
the tin robots sold at fairs.
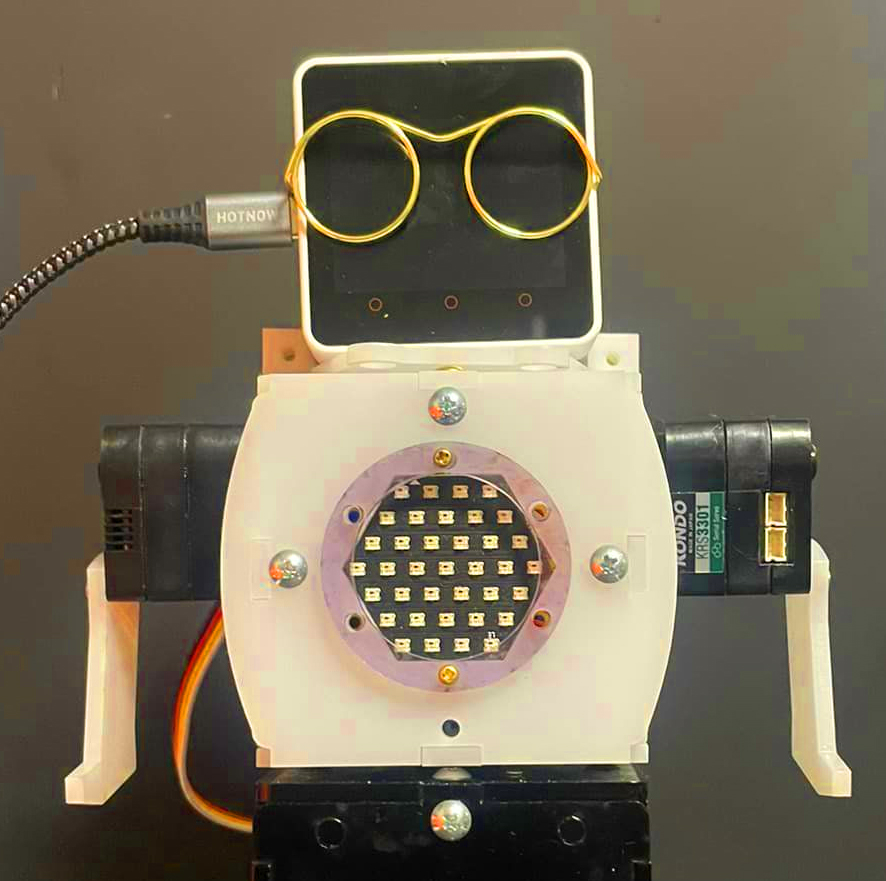
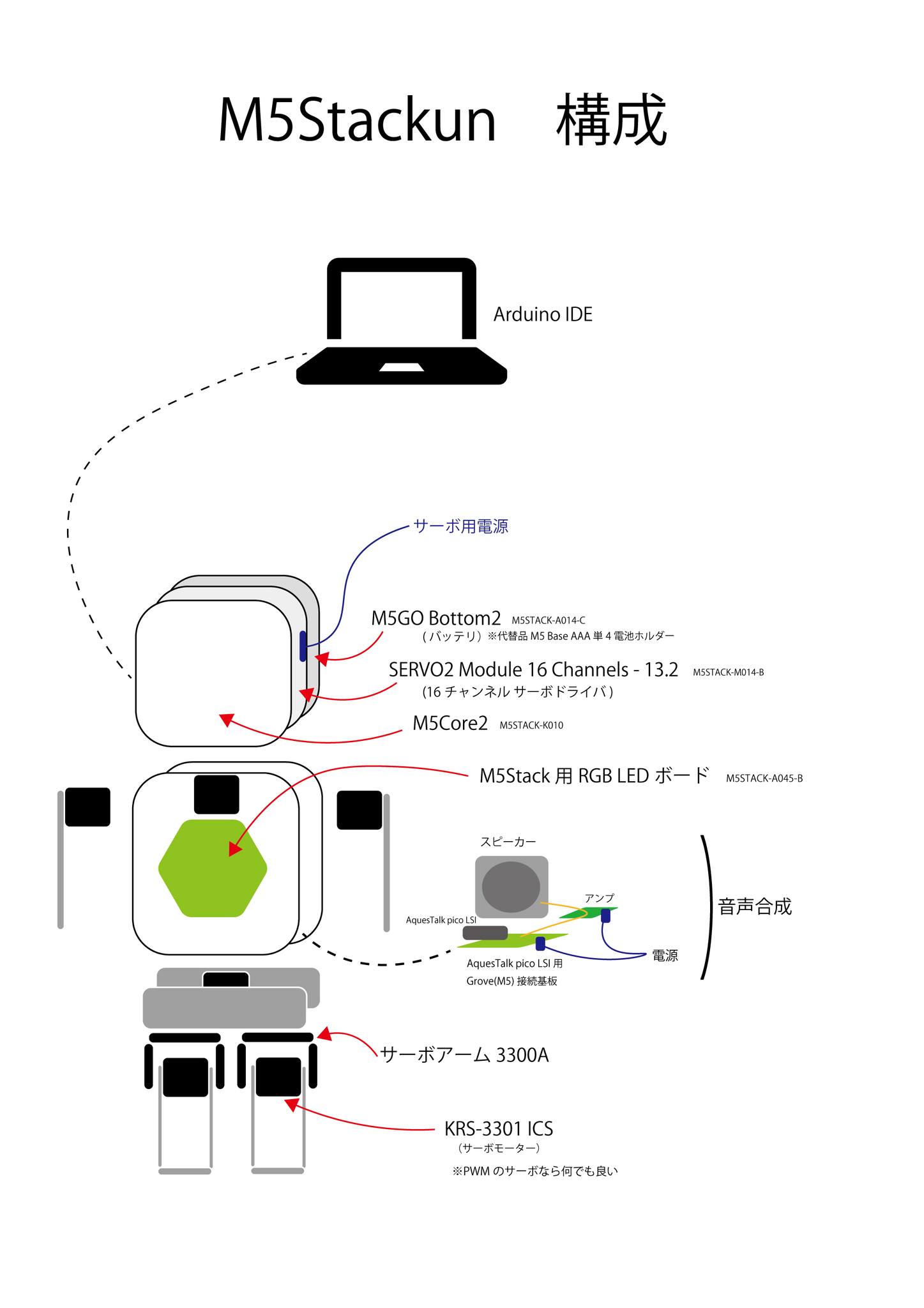
Configuration of M5Stackun under
development.
Based on Core2, it has a function of
speech synthesis with 6 axes.
For the beginning, I want to make it
walk and speak.
現在開発中のM5Stackunの構成。
Core2をベースに6軸で音声合成の機能を備えています。
とりあえず、歩いて喋れるところまで作りたい。
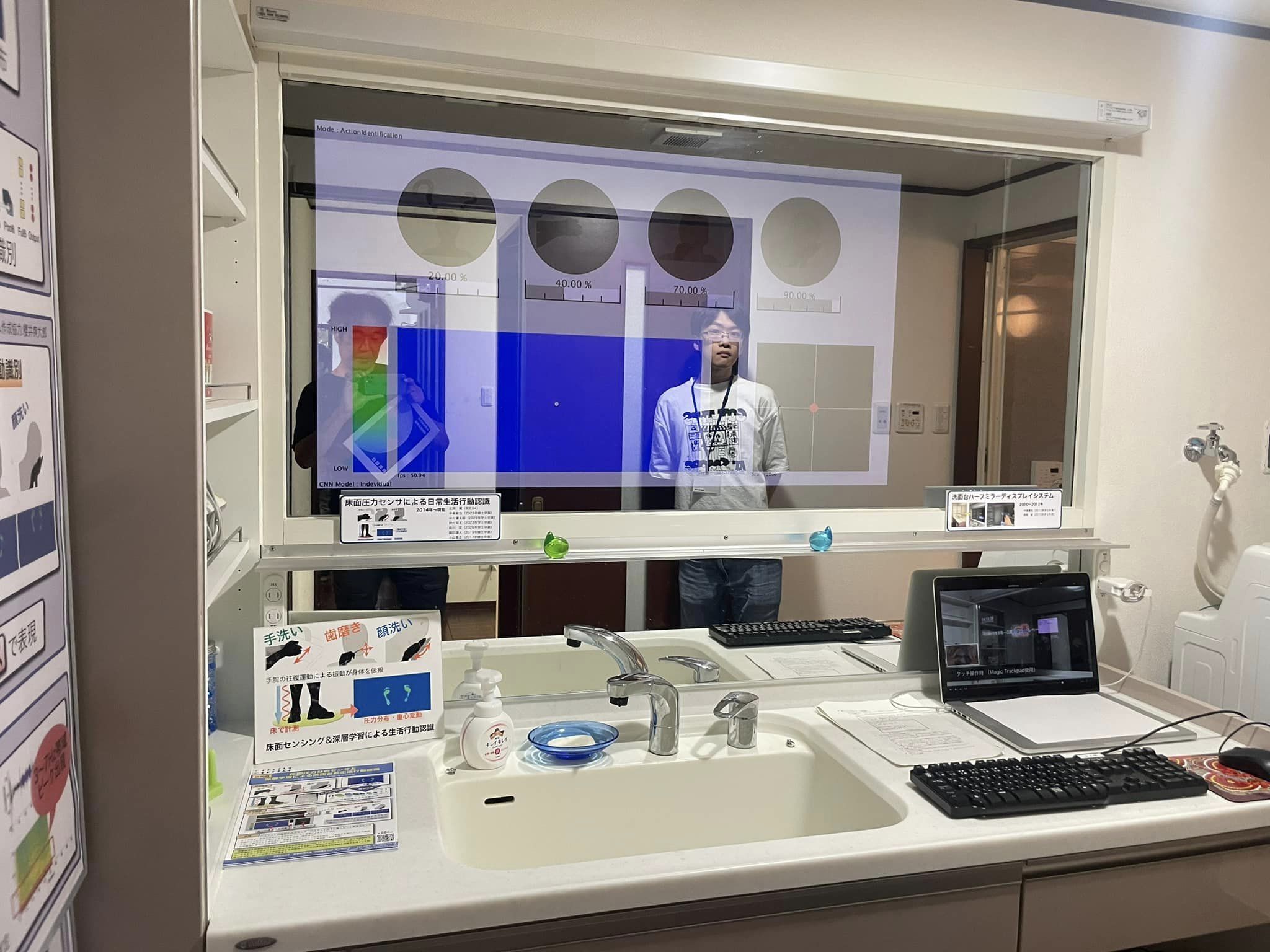
8月8日
I visited Prof. Hirai's laboratory at
Kyoto Industrial University.
I saw some exhibits of smart houses by
his research group.
A special feature is the bathtub that
can play music.
A monitor using a half-mirror was used
in the washbasin exhibition.
8月6日
兜
I made a helmet that Shohei Ohtani
wears when he hits a home run.
A horn made with a laser cutter using
scrap acrylic is attached to the bowl
for polishing rice sold by DASIO.
I would like to bring it to the
exhibition in Malaysia.
8月4日
M5Stackを使用したロボットの製作 第5週
Production of a robot using M5Stack -
Week 5
I remade the frame and tried adding
legs, but found that it would
interfere with the waist servos.
So I installed legs on the outside of
the knees.
It seems that some other corrections
are needed, such as the limbs being
too short.
I'm planning to make it walk with
joints on its knees rather than his
legs, but is that possible?
I see M5Stack robots on SNS, but it
seems that there are not many humanoid
robots that can walk, so I want to aim
for that.