Illumination experiment
I tried applying the image from the
projector to a mirror and reflection
sheet, but it was not reflected at
all.
I tried applying a laser, but the
image is also faint on the mirror
surface.
I would like to hang something like a
disco ball from above to illuminate
the disk, next time.
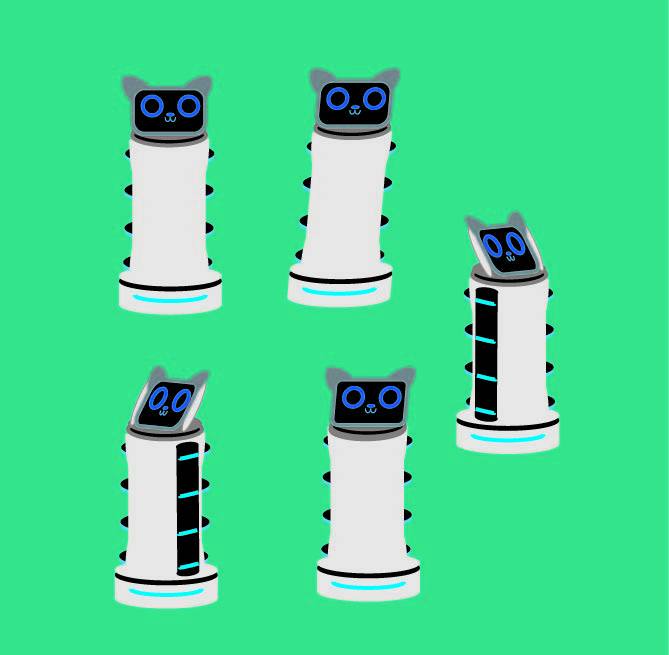
Round arrangement of robots
I tried to see if robots could play
with side by side.
If I arrange them in a circle, it will
end up with one robot that is always
facing its back.
In order to avoid this, there is a way
to rotate the whole disk and bring one
by one to the front in order.
Also, I can put a mirror on the back
as shown in the video.
I wondered if it would be like a
kaleidoscope if the table on which the
bells are placed is also mirrored and
the whole is rotated. . .
I put a reflective sheet on it this
video, but I want something more than
just the reflection of the LED.
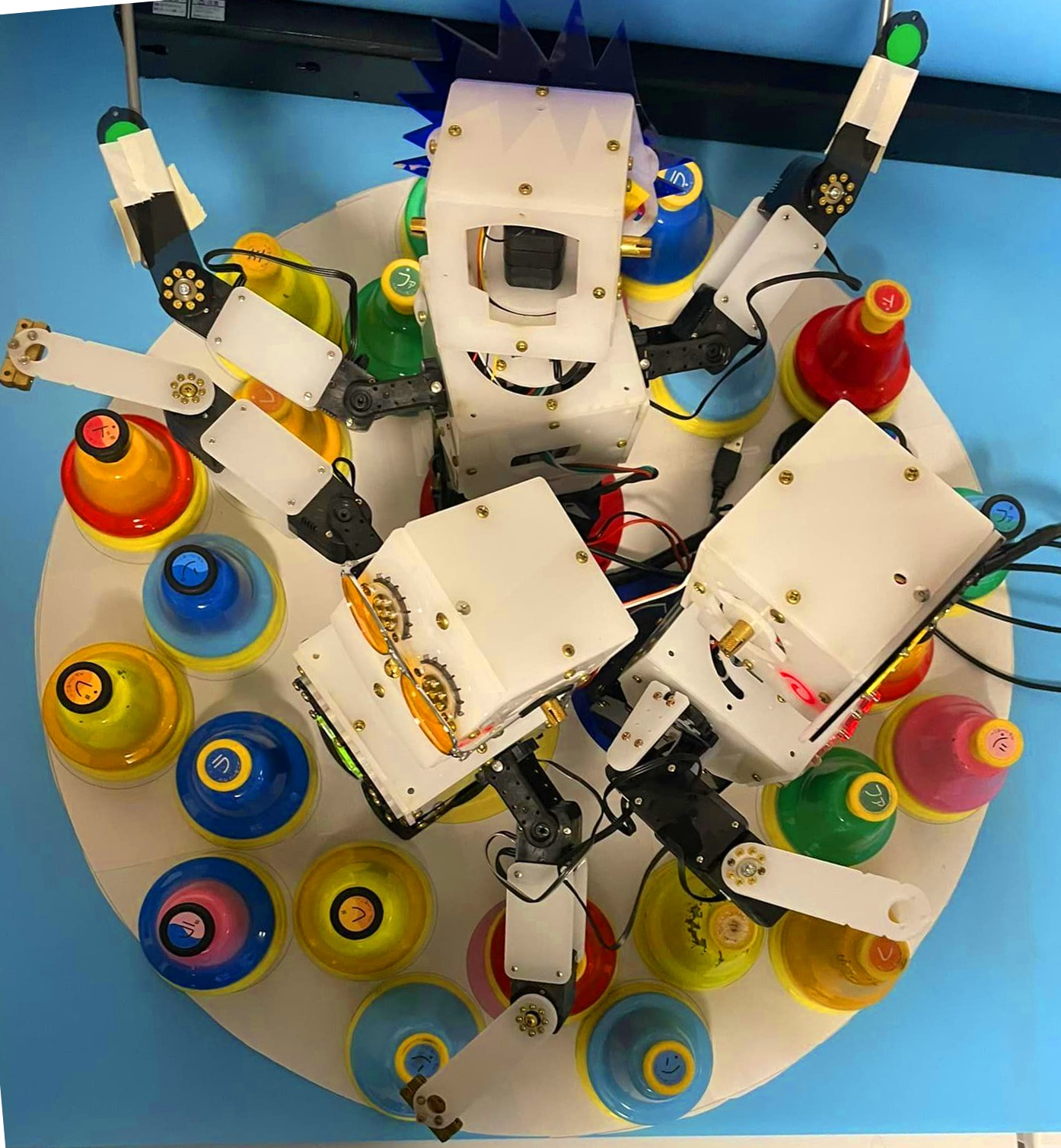
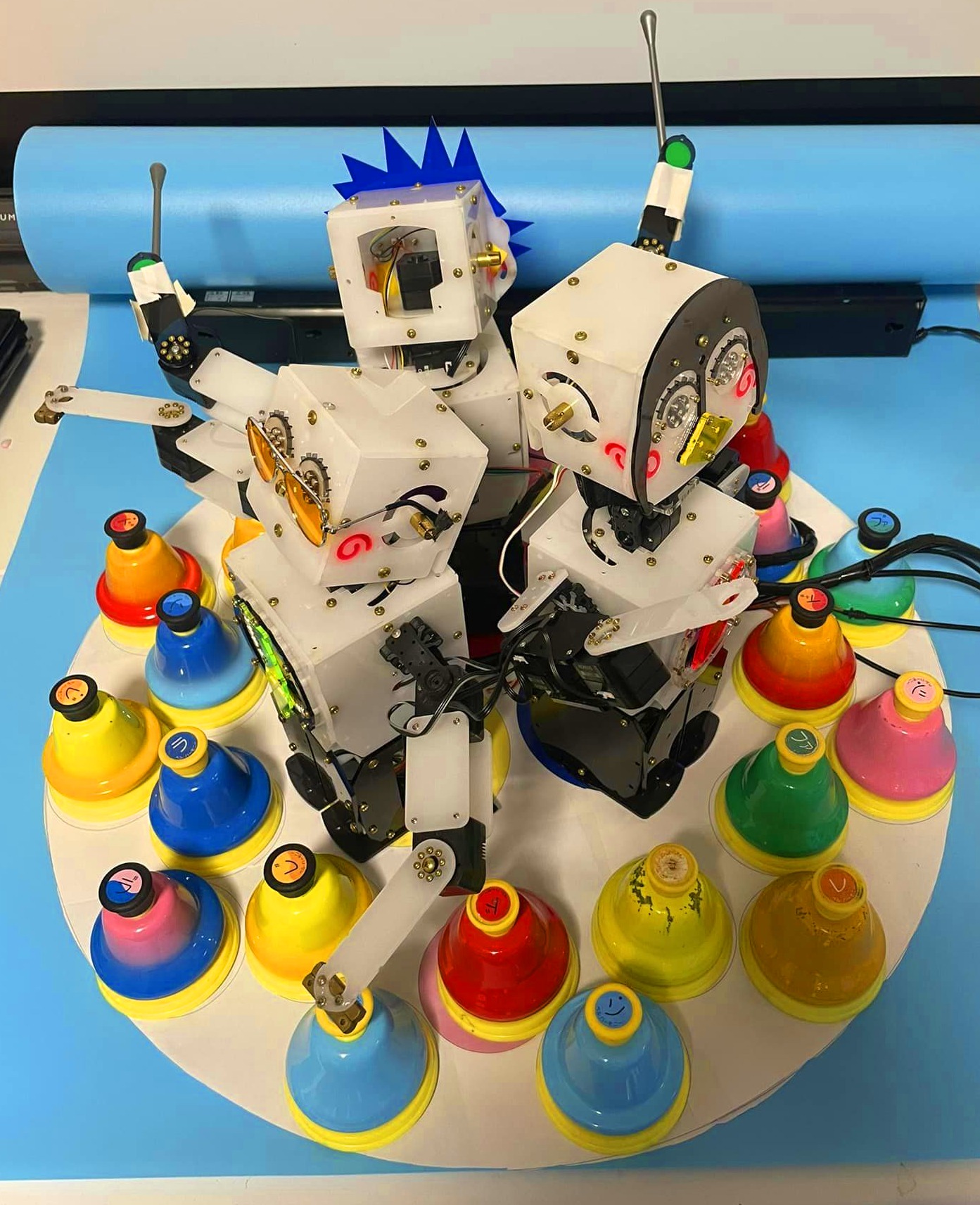
Three robots and 24 bells (2 octaves)
are arranged in a circle.
It's pretty dense, but the advantage
of being able to fit in a 60 cm square
is great.
The robot in the front puts on a hat
to celebrate Mozart's birthday,
January 27th.
- Arrange three robots in a circle and
have them play music automatically -
I made a prototype to see if I could
place bells for one robot within 120
degrees.
Acrylic is expensive, so I used wood
for now.
It seems possible to hit each bell,
If the robot move its hand quickly
before the next bell, It might touch
another bell.
I want to put them on a table with a
depth of 60 cm and rotate it like a
merry-go-round.
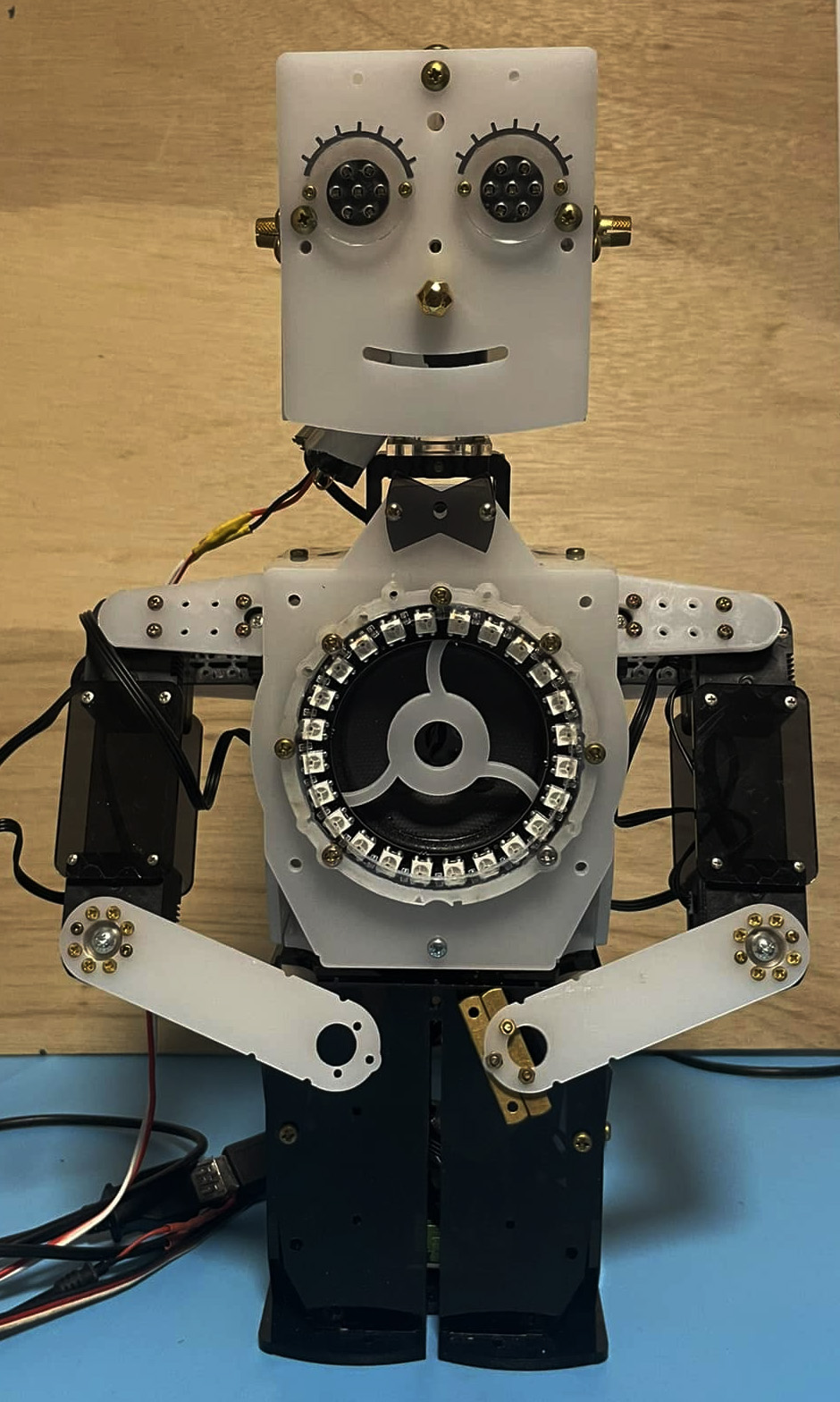
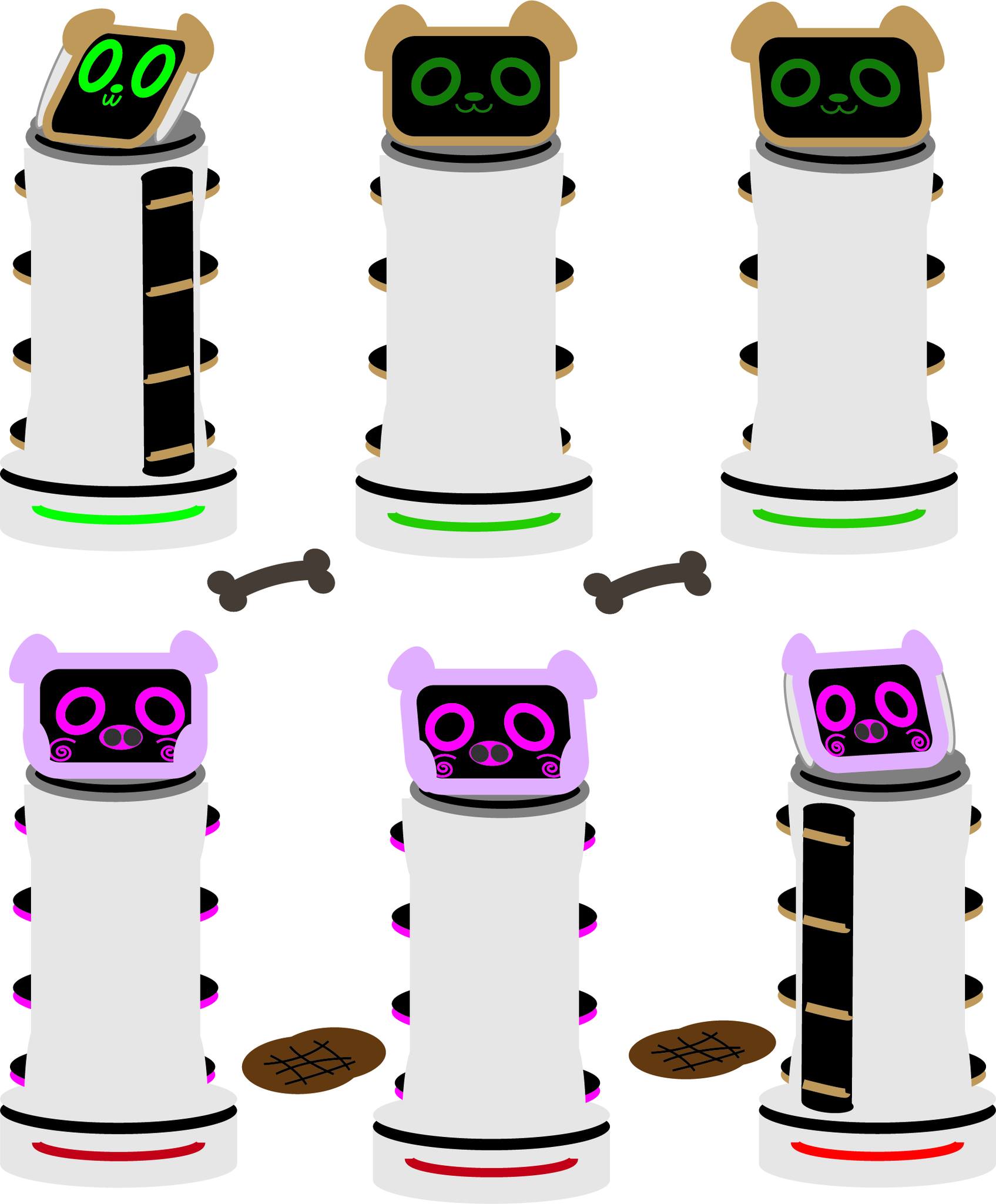
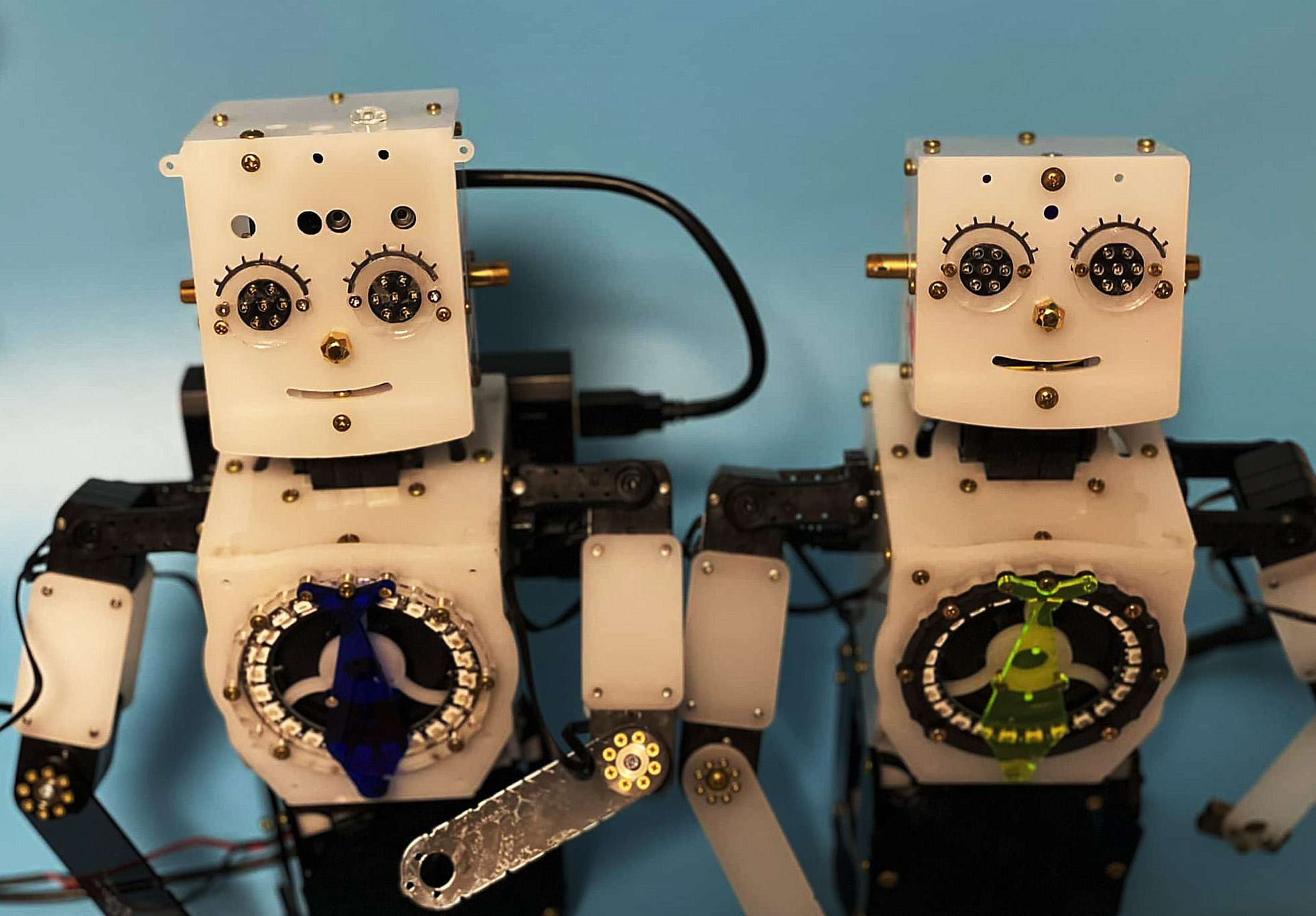
I found that if the robot's face was
vertically long, it would be easier to
put various headgear on it.
I put dog glasses, hats, and demon
masks for Bean-Throwing Festival.
Two sets of eight magnets are used.
It would be ok if the head was
horizontal, but if the neck is tilted
downward, the suction force will not
be enough and it will not be able to
support the head.
There are 1.5mm pieces of acrylic
sandwiched between them, so if the
magnets were exposed, they'd be
stronger...
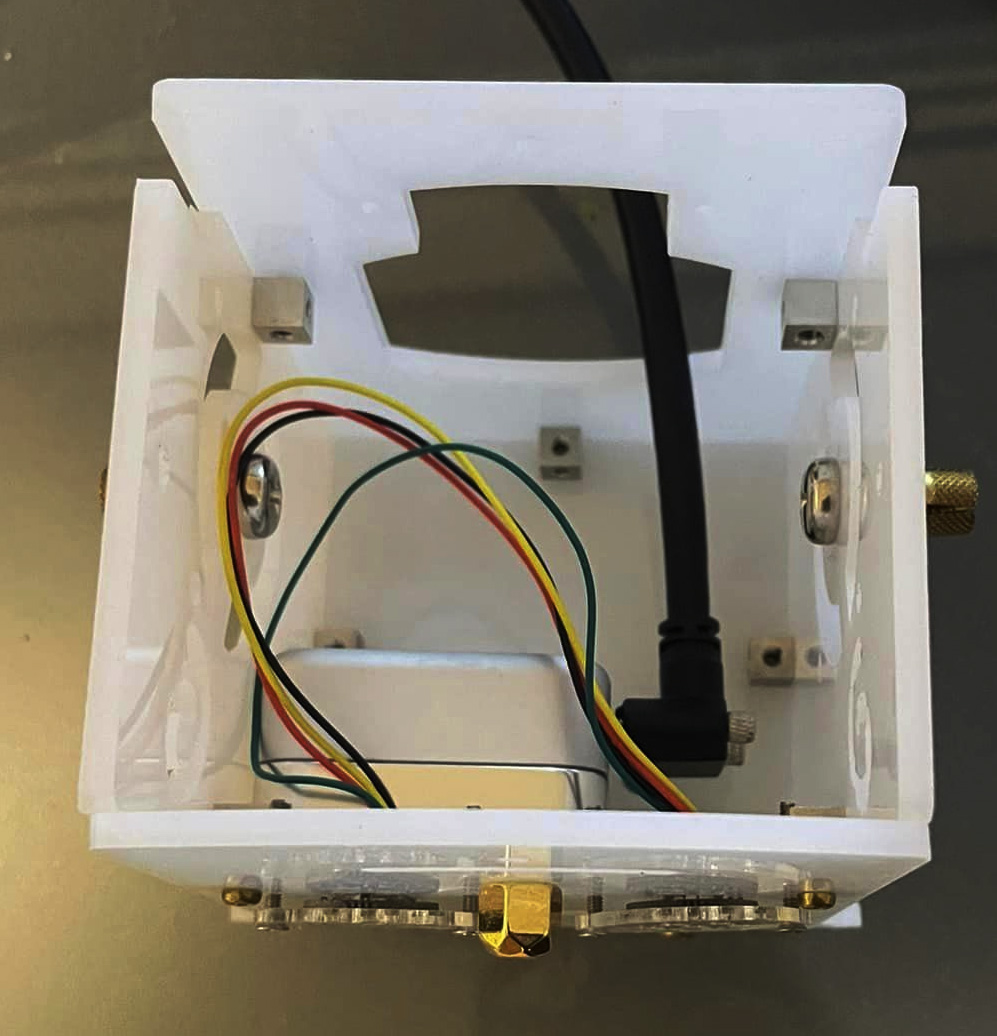
Separation of robot head and body with contactless charging module
[Separation of robot head and body
with contactless charging module]
Made it possible to remove the head
from the body using magnets.
However, since the wiring of the power
supply source rotates together, it can
not rotate infinitely.
I'm exploring if I can separate it
that are screwed together using bonds.
The magnets are also weak, so I need
more of them.
Production of a communication robot
(16th month)
We have changed the configuration of
the system to improve its
functionality.
In the new version, the PC on the back
is a lattepanda 3 Delta to increase
the processing power.
As for the camera, RealSense has
changed from D435i to smaller D405 and
now stores it in its head.
Because the hole in the head was
small, the field of view became
narrow. It need to change bigger
holes.
Respeakers is also the newer version.
In the new version of the
communication robot, in addition to
RealSense, Lattepanda and ReSpeaker
will also be replaced with new
versions.
Lattepanda is one size larger "lattepanda
3 alpha" to increase processing power,
RealSense is changed from D435i to one
size smaller D405 and stored in the
head. The old one remains with a panda
face and short hair.
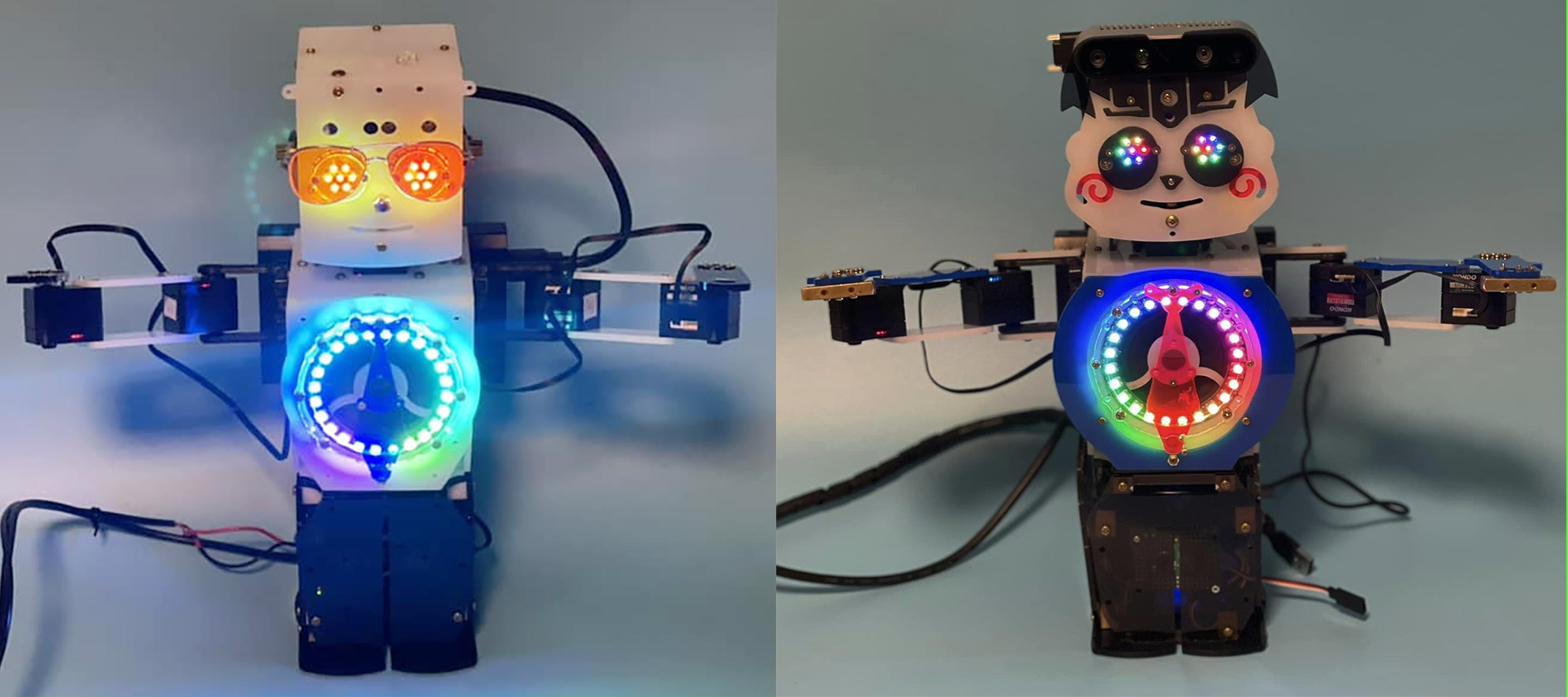
We changed RealSense from D435i to
D405, which is one size smaller, and
embedded it in the robot's head.
The head is a little vertically long,
but I think it will look just right if
I make something like hair and attach
it to the robot.
By storing RealSense in the head, the
risk of failure of the connector part
should be reduced.
I am considering whether it is
possible to arrange automatic
performance robots in a circle.
If it can be placed on a disk with a
diameter of 60 cm, it should be very
convenient.
However, the shoulders of the robots
are likely to collide, and with this
arrangement, some bells may not be
reached.
If I can place it on the disk, I want
to rotate the whole thing with a
servo.
During the transfer to Taiwan, the
acrylic part of the robot's hair was
cracked, and the left and right were
cracked in the same way, making it
look like a boy with short hair.
The picture of a child on a souvenir
bag from Taiwan also has this kind of
hairstyle, so maybe it was just right.
I would like to redesign the head in
this way.
台湾への移動中に、ロボットの髪の毛の部分のアクリルが割れてしまっていたのですが、左右で同じように割れていて、短髪の男の子みたいになっていました。
台湾のおみやげの袋に書いてある子供の絵もこんな髪型だから、ちょうとよかったのかも。頭部はこの方向でデザインしなおしたいと思います。
1月1日
ロボット漫才
Standup comedy by Robots for new year
新春漫才「去年の話」
ロボット漫才の3作目です。